Lösungsansatz
Das Vorhaben FLOOW nutzt die zentralen Vorteile der Künstlichen Intelligenz (KI) zur Schaffung neuer Lösungen für die Mobilität von Menschen und Gütern. Diese betreffen insbesondere die robuste und hochgenaue Lokalisierung der Mobilitätssysteme (Indoor und Outdoor), die generalisierte Umfelderkennung sowie die risikobewusste Manöverplanung auf dedizierter Hardware zur energieeffizienten Lösung der komplexen Teilprobleme auf den Fahrzeugen. Dabei wird der Einsatz im Innen- und Außenbereich sowie der kombinierte Einsatz mit Übergang zwischen den beiden Bereichen adressiert. Als exemplarische Fahrzeugplattformen dienen ein Fahrerloses Transportsystem (FTS), ein automatisiertes Lastenfahrrad und ein Cargo-Mover.

Ein wichtiger Aspekt ist die Entwicklung eines Low-Power KI-Hardware-Setups, welches kostengünstig und ressourcenschonend die nötige Performanz für die Berechnungen innerhalb der künstlichen neuronalen Netze bereitstellt. Zur Umsetzung der von der KI-Hardware berechneten Steuersignale in die kollisionsfreie Fahrzeugbewegung wird ein Regelungs- und Sicherheitssystem entwickelt. Das Sicherheitssystem reagiert auf Planungsfehler und bringt das Fahrzeug in einen sicheren Zustand. Die KI hilft dabei, die benötigten Systemparameter dynamisch zu ermitteln. Die abschließende Integration der Prototypen in das Mobilitätsgesamtsystem mit intelligenter Flottennutzung auf einem Werksgelände stellt eine exemplarische Umsetzung für einen urbanen Einsatz bei Marktreife dar.
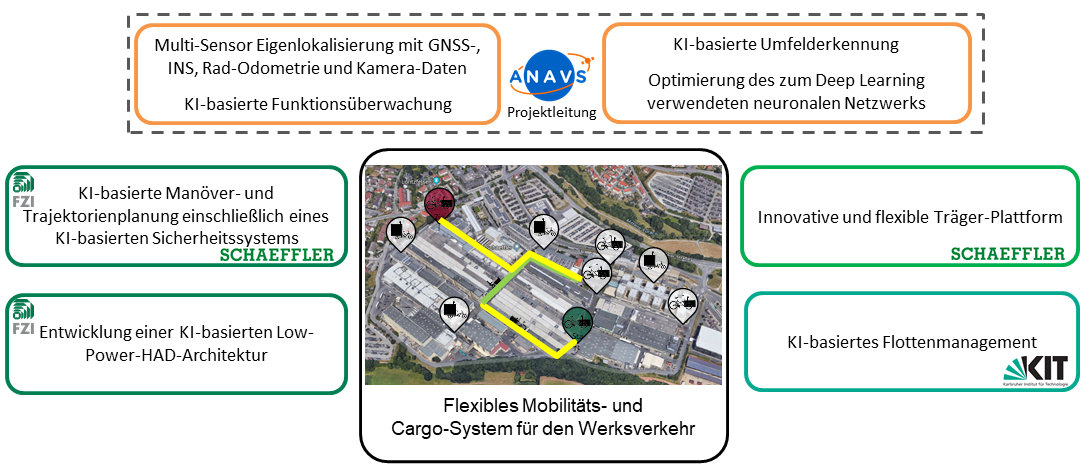
Die ANavS GmbH hat die Projektleitung und entwickelt in FLOOW eine effiziente Multi-Sensor Lokalisierung und Umfelderkennung. Die Themenschwerpunkte liegen dabei auf der Entwicklung einer UWB-basierten Indoor-Lokalisierung mit mehreren Ankern, einer sehr umfassenden Sensorfusion von GNSS, INS, Rad-Odometrie, UWB, Kamera und Lidar mit einer verteilten Sensorik und Prozessierung (kostengünstige Sensoren und Prozessoren auf der Fahrzeugplattform, hochpreisige Sensoren und Prozessoren in der Infrastruktur), und eine KI-basierte Umfelderkennung mit Kombination von Kamera- und Lidar-Daten.
Das FZI Forschungszentrum Informatik entwickelt in FLOOW eine KI-basierte Bewegungsplanung in Interaktion und Kommunikation mit der Umgebung, und eine Absicherung der KI-basierten Funktionen durch eine zusätzliche Rückfallebene. Dabei wird auch die nonverbale Kommunikation zwischen den beteiligten Verkehrsteilnehmern betrachtet. Zum Beispiel können Methoden der Spieltheorie zur Modellierung von Verhandlungen über die weitere Bewegung eingesetzt werden. Zudem entwickelt das FZI eine KI Low-Power Architektur mit spezialisierten Beschleunigern für die HADS Plattform. Eine besondere Herausforderung stellen dabei die Beschränkungen an Bauraum, Energie und Kosten dar, die bei den betrachteten Low-Risk-Vehicles gegeben sind. Das FZI erforscht eine Lösung, die den Einsatz von aktuellsten KI Methoden unter Einhaltung der genannten Randbedingungen ermöglicht.
Die Schaeffler Technologies AG & Co. KG vertreten durch das SHARE am KIT stellt drei Fahrzeugplattformen aus vorangegangenen Projekten für FLOOW zur Verfügung: ein Rolling-Chassis als Cargo-Mover, ein automatisiertes Lastenrad und ein Fahrerloses Transportsystem (FTS). Für die optimale Funktionalität innerhalb des Mobilitätsgesamtsystems werden die mechatronischen Fahrwerksysteme der Fahrzeuge sowohl konstruktiv als auch regelungstechnisch an die neuen Anforderungen für Indoor und Outdoor-Anwendungen angepasst oder neugestaltet. Ein Trajektorienfolgeregler sorgt dafür, dass die Informationen der Bewegungsplanung effizient auf den Fahrzeugen umgesetzt werden. Um den Flottenbetrieb sicherzustellen, sind die Fahrzeuge mit einer speziellen Connectivity-Lösung zur Einbindung in das Mobilitätsgesamtsystem ausgestattet.
Das Institut für Fahrzeugtechnik (FAST) am Karlsruher Institut für Technologie (KIT) baut im Vorhaben FLOOW eine Simulationsumgebung für die verwendeten Demonstratorfahrzeuge auf und stellt digitale Karten der Testumgebung bereit. Die Konzeptionierung von Chassis-Systemen für den kombinierten Indoor- und Outdoor-Betrieb, die Ableitung funktionaler Anforderungen an solche Systeme sowie die Konzeptionierung der zugehörigen Indoor- und Outdoor-Regelungs- und Automatisierungsansätze sind weitere Aufgaben. Zudem wird ein KI-basiertes Flottenmanagement entwickelt und integriert. Das KIT-FAST koordiniert die Integration der Teilsysteme zu Funktionseinheiten und deren Erprobung sowie die Evaluation des Gesamtsystems anhand von realitätsnahen Anwendungstests.
Die in dem Vorhaben FLOOW entwickelten Technologien sind äußerst vielseitig einsetzbar: Zu den Anwendungsbereichen zählt der automatisierte Waren- und Personentransport auf Werksgeländen, die automatisierte Identifikation und Lokalisation von Waren und Werkzeugen vom Wareneingang bis zur Produktion, ein optimierter und automatisierter Logistik-Planungsprozess, eine automatisierte Bestandsüberwachung, eine Live-Überwachung des Materialflusses, ein Lotsen-System auf Firmengeländen für Lieferanten-Fahrzeuge, automatisierte Kehrmaschinen, eine automatisierte Security/ Überwachung und viele weitere.
