Der Trend zur Urbanisierung hält weltweit seit Jahrzehnten an. Inzwischen lebt über ein Drittel der Bevölkerung in dicht besiedelten Regionen, wodurch sich Wohn- und Parkraum fortlaufend verknappen. Pendlerströme und innerstädtischer Verkehr führen zu massiver Überlastung der Infrastruktur und Verknappung des Verkehrsraumes. Studien zufolge macht z.B. allein die Suche nach Parkplätzen bis zu 30 Prozent des innerstädtischen Verkehrsaufkommens aus [1]. Sharing und Pooling von Fahrzeugen sind eine erfolgversprechende Alternative zu Fahrten mit dem motorisierten Individualverkehr. Hierzu fehlen jedoch oftmals Lösungen zu einer flexiblen und komfortablen Nutzung, weshalb die Akzeptanz solcher Konzepte gegenwärtig noch gering ist. Gesucht wird eine Alternative, welche mit dem Komfort selbstgenutzter PKWs (Beladung, Mitnahme von Personen, räumlich und zeitlich flexible Nutzung, etc.) konkurrieren kann, und gleichzeitig den Bedarf an Fahrzeugen sowie den Flächenverbrauch pro Fahrzeug signifikant reduziert. Zu diesem Zweck sind Lösungen im Bereich der autonomen Fahrzeuge und der Mikromobilität sehr gefragt. Dies zeigt sich auch im geschätzten Marktvolumen der Autonomie- und Mikromobilitätsbranche von 700 Mrd. US-Dollar im Jahr 2030 laut Goldmann Sachs [2]. Diese Lücke zu schließen und auf einem abgeschlossenen Versuchsgelände zu demonstrieren ist Ziel des Verbundprojekts FLOOW.
[1] https://www.elektroniknet.de/deutsche-telekom-smarter-parken-110752.html
[2] Goldman Sachs (2019) - The Future of Mobility, Report, https://www.goldmansachs.com/insights/pages/gs-research/future-of-mobility/report.pdf
Das Vorhaben FLOOW nutzt die zentralen Vorteile der Künstlichen Intelligenz (KI) zur Schaffung neuer Lösungen für die Mobilität von Menschen und Gütern. Diese betreffen insbesondere die robuste und hochgenaue Lokalisierung der Mobilitätssysteme (Indoor und Outdoor), die generalisierte Umfelderkennung sowie die risikobewusste Manöverplanung auf dedizierter Hardware zur energieeffizienten Lösung der komplexen Teilprobleme auf den Fahrzeugen. Dabei wird der Einsatz im Innen- und Außenbereich sowie der kombinierte Einsatz mit Übergang zwischen den beiden Bereichen adressiert. Als exemplarische Fahrzeugplattformen dienen ein Fahrerloses Transportsystem (FTS), ein automatisiertes Lastenfahrrad und ein Cargo-Mover.

Ein wichtiger Aspekt ist die Entwicklung eines Low-Power KI-Hardware-Setups, welches kostengünstig und ressourcenschonend die nötige Performanz für die Berechnungen innerhalb der künstlichen neuronalen Netze bereitstellt. Zur Umsetzung der von der KI-Hardware berechneten Steuersignale in die kollisionsfreie Fahrzeugbewegung wird ein Regelungs- und Sicherheitssystem entwickelt. Das Sicherheitssystem reagiert auf Planungsfehler und bringt das Fahrzeug in einen sicheren Zustand. Die KI hilft dabei, die benötigten Systemparameter dynamisch zu ermitteln. Die abschließende Integration der Prototypen in das Mobilitätsgesamtsystem mit intelligenter Flottennutzung auf einem Werksgelände stellt eine exemplarische Umsetzung für einen urbanen Einsatz bei Marktreife dar.
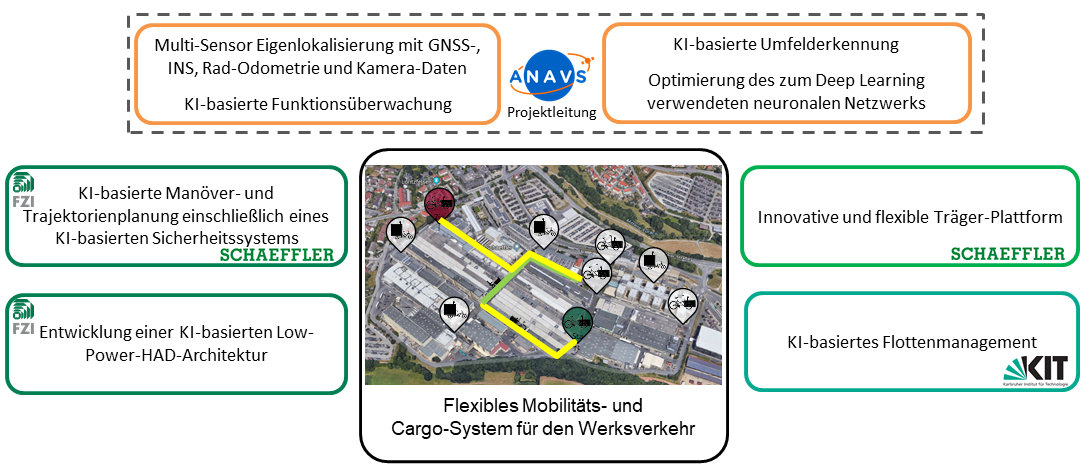
Die ANavS GmbH hat die Projektleitung und entwickelt in FLOOW eine effiziente Multi-Sensor Lokalisierung und Umfelderkennung. Die Themenschwerpunkte liegen dabei auf der Entwicklung einer UWB-basierten Indoor-Lokalisierung mit mehreren Ankern, einer sehr umfassenden Sensorfusion von GNSS, INS, Rad-Odometrie, UWB, Kamera und Lidar mit einer verteilten Sensorik und Prozessierung (kostengünstige Sensoren und Prozessoren auf der Fahrzeugplattform, hochpreisige Sensoren und Prozessoren in der Infrastruktur), und eine KI-basierte Umfelderkennung mit Kombination von Kamera- und Lidar-Daten.
Das FZI Forschungszentrum Informatik entwickelt in FLOOW eine KI-basierte Bewegungsplanung in Interaktion und Kommunikation mit der Umgebung, und eine Absicherung der KI-basierten Funktionen durch eine zusätzliche Rückfallebene. Dabei wird auch die nonverbale Kommunikation zwischen den beteiligten Verkehrsteilnehmern betrachtet. Zum Beispiel können Methoden der Spieltheorie zur Modellierung von Verhandlungen über die weitere Bewegung eingesetzt werden. Zudem entwickelt das FZI eine KI Low-Power Architektur mit spezialisierten Beschleunigern für die HADS Plattform. Eine besondere Herausforderung stellen dabei die Beschränkungen an Bauraum, Energie und Kosten dar, die bei den betrachteten Low-Risk-Vehicles gegeben sind. Das FZI erforscht eine Lösung, die den Einsatz von aktuellsten KI Methoden unter Einhaltung der genannten Randbedingungen ermöglicht.
Die Schaeffler Technologies AG & Co. KG vertreten durch das SHARE am KIT stellt drei Fahrzeugplattformen aus vorangegangenen Projekten für FLOOW zur Verfügung: ein Rolling-Chassis als Cargo-Mover, ein automatisiertes Lastenrad und ein Fahrerloses Transportsystem (FTS). Für die optimale Funktionalität innerhalb des Mobilitätsgesamtsystems werden die mechatronischen Fahrwerksysteme der Fahrzeuge sowohl konstruktiv als auch regelungstechnisch an die neuen Anforderungen für Indoor und Outdoor-Anwendungen angepasst oder neugestaltet. Ein Trajektorienfolgeregler sorgt dafür, dass die Informationen der Bewegungsplanung effizient auf den Fahrzeugen umgesetzt werden. Um den Flottenbetrieb sicherzustellen, sind die Fahrzeuge mit einer speziellen Connectivity-Lösung zur Einbindung in das Mobilitätsgesamtsystem ausgestattet.
Das Institut für Fahrzeugtechnik (FAST) am Karlsruher Institut für Technologie (KIT) baut im Vorhaben FLOOW eine Simulationsumgebung für die verwendeten Demonstratorfahrzeuge auf und stellt digitale Karten der Testumgebung bereit. Die Konzeptionierung von Chassis-Systemen für den kombinierten Indoor- und Outdoor-Betrieb, die Ableitung funktionaler Anforderungen an solche Systeme sowie die Konzeptionierung der zugehörigen Indoor- und Outdoor-Regelungs- und Automatisierungsansätze sind weitere Aufgaben. Zudem wird ein KI-basiertes Flottenmanagement entwickelt und integriert. Das KIT-FAST koordiniert die Integration der Teilsysteme zu Funktionseinheiten und deren Erprobung sowie die Evaluation des Gesamtsystems anhand von realitätsnahen Anwendungstests.
Die in dem Vorhaben FLOOW entwickelten Technologien sind äußerst vielseitig einsetzbar: Zu den Anwendungsbereichen zählt der automatisierte Waren- und Personentransport auf Werksgeländen, die automatisierte Identifikation und Lokalisation von Waren und Werkzeugen vom Wareneingang bis zur Produktion, ein optimierter und automatisierter Logistik-Planungsprozess, eine automatisierte Bestandsüberwachung, eine Live-Überwachung des Materialflusses, ein Lotsen-System auf Firmengeländen für Lieferanten-Fahrzeuge, automatisierte Kehrmaschinen, eine automatisierte Security/ Überwachung und viele weitere.


Schaeffler Lastenrad: Das Schaeffler iCargo ist ein elektrifiziertes Lastenrad, das per Fernsteuerung gefahren werden kann. Dieses Demonstratorfahrzeug besitzt einen Vorderwagen mit einer Ladefläche zwischen zwei radselektiv angetriebenen Vorderrädern und einen Hinterwagen, der über eine Schwenkachslenkung mit dem Vorderwagen verbunden ist. Je nachdem wie stark die jeweiligen Motoren angetrieben werden fährt das Fahrzeug geradeaus oder geht in eine Kurvenfahrt über.

Schaeffler Rolling Chassis: Das Rolling Chassis/Demonstratorfahrzeug ELF++ stammt aus dem Förderprojekt e²-Lenk. Es handelt sich dabei um ein Fahrzeug im Maßstab 1:1,5 mit Ackermann-Lenkung und radselektiven elektrischen Antrieben an der gelenkten Achse. Das Fahrzeug kann mit einer Geschwindigkeit von max. 30 km/h betrieben werden und hat einen Wendekreis von ca. 10m. Dieses Fahrzeug stellt die Grundlage für ein sowohl outdoorfähiges als auch indoorfähiges Personen- und Gütertransportsystem dar. Um einen Demonstrator für den Übergangsbereich zwischen Outdoor- und Indoortransporten zu entwickeln, bedarf dies einer konstruktiven Umgestaltung des Fahrwerksystems und der mechatronischen Anpassung des Demonstrators, sowie der Neukonzipierung der Regelung des neuartigen Chassis-Systems als auch der Anpassung der Automatisierungsebene.

Schaeffler FTS: Das Demonstratorfahrzeug Schaeffler FTS (Fahrerloses Transport Fahrzeug) zeigt die Realisierung eines quasi-omnidirektionalen Fahrwerks unter Einsatz von nur drei Aktoren. Zwei Motoren dienen als Differentialantrieb und ein weiterer als Lenkaktor. Dies ermöglicht diverse Fahrmanöver wie etwa seitliches/diagonales Fahren oder auch Wenden auf der Stelle. Das Fahrzeug ist als ferngesteuerte Einheit mit einer ebenen Oberseite ausgeführt, um einen möglichen Anwendungsfall in Lagerhäusern o.ä. abzubilden.
Hier stehen alle Publikationen des Projekts FLOOW für Sie zum Download bereit.
- T. Rudolf, M. Gao, T. Schürmann, S. Schwab and S. Hohmann, "Fuzzy Action-Masked Reinforcement Learning Behavior Planning for Highly Automated Driving," 2022 8th International Conference on Control, Automation and Robotics (ICCAR), Xiamen, China, April 2022, pp. 264-270, https://doi.org/10.1109/ICCAR55106.2022.9782671.
- N. Majer, L. Luithle, T. Schürmann, S. Schwab and S. Hohmann, "Game-Theoretic Trajectory Planning of Mobile Robots in Unstructured Intersection Scenarios," IFAC-PapersOnLine, 2023, 56 (2), pp. 11808-11814, https://doi.org/10.1016/j.ifacol.2023.10.575
- A. Seiffer, M. Frey and F. Gauterin, "Pragmatic and Effective Enhancements for Stanley Path-Tracking Controller by Considering System Delay," Vehicles, 2023, 5(2),pp. 615-636, https://doi.org/10.3390/vehicles5020034
- P. Henkel, S. Parimi, J. Fischer, U. Mittmann and R. Bensch, “Precise positioning for autonomous driving in areas with both indoor and outdoor environments,” Proceedings of the 2024 International Technical Meeting of The Institute of Navigation, Long Beach, California, January 2024, pp. 1074-1084, https://doi.org/10.33012/2024.19534.
- Abdelhalim, G., Simon, K., Bensch, R., Parimi, S., Qureshi, B.-A., „Automated AI-based Annotation Framework for 3D Object Detection from LIDAR Data in Industrial Areas“, Society of Automotive Engineers (SAE) Technical Paper, Bd. 2024-01–2999, S. 14, Juli 2024, doi: 10.4271/2024-01-2999.
Die ANavS GmbH aus München entwickelt Systeme zur Zentimeter-genauen Positionierung für zahlreiche Anwendungen von der Vermessung und Kartierung bis hin zu autonomen Robotern, Fahrzeugen, Schiffen und UAVs. Eine hohe Genauigkeit und Zuverlässigkeit wird durch ein von ANavS entwickeltes RTK/ PPP-Verfahren und eine umfassende Sensorfusion von Satellitennavigationssignalen (GPS, Galileo, GLONASS, Beidou), Inertial-Sensor-Messungen, Rad-Odometrie-, Kamera- und LiDAR-Daten erreicht. Die beiden wichtigsten Produkte von ANavS sind das Multi-Sensor RTK-Modul und die Integrierte Sensor-Plattform (ISP). Die Vorteile des ANavS Positionierungssystems liegen in der hohen Genauigkeit, den verschiedenen Schnittstellen (USB, Ethernet, CAN, UART, WiFi, GSM/ LTE), dem attraktiven Preis-Leistungs-Verhältnis, der geringen Größe, dem niedrigen Gewicht, dem geringen Stromverbrauch und der einfachen Systemintegration.
Das FZI Forschungszentrum Informatik ist eine gemeinnützige Einrichtung für Informatik-Anwendungsforschung und Technologietransfer. Es bringt die neuesten wissenschaftlichen Erkenntnisse der Informationstechnologie in Unternehmen und öffentliche Einrichtungen und qualifiziert junge Menschen für eine akademische und wirtschaftliche Karriere oder den Sprung in die Selbstständigkeit.
Junge Wissenschaftlerinnen und Wissenschaftler kommen ans FZI, um Forschung für ihre Promotion zu betreiben. Durch die enge Zusammenarbeit mit Kundinnen und Kunden sammeln sie Erfahrung für zukünftige Führungsaufgaben. Oft wechseln sie direkt nach ihrer Arbeit am FZI in Managementpositionen.
Unterstützt von Professorinnen und Professoren verschiedener Fakultäten entwickeln die Forschungsgruppen am FZI interdisziplinär für ihre Auftraggebenden Konzepte, Software-, Hardware- und Systemlösungen und setzen die gefundenen Lösungen prototypisch um. Wissenschaftliche Exzellenz und gelebte Interdisziplinarität sind somit in der Organisation verankert.
Im Bereich der Informationstechnologie ist das FZI Innovationsdrehscheibe in Baden-Württemberg. Als wirtschaftsnahe Forschungseinrichtung erfüllen wir die Aufgabe einer Schnittstelle zwischen universitärer Forschung und praktischer Anwendung. Wir sind der Innovationspartner im Bereich IT des Karlsruher Instituts für Technologie (KIT) und der Wirtschaft und Mitglied der Innovationsallianz innBW sowie der Innovationsallianz TechnologieRegion Karlsruhe.
Die SCHAEFFLER Technologies AG & Co. KG entwickelt bzw. fertigt Präzisionsprodukte für Industrie- und Automotive-Anwendungen. Für die Herausforderungen der zukünftigen urbanen Mobilität werden in der Schaeffler Gruppe Lösungen für das autonome Fahren und neue Mobilitätskonzepte wie den SCHAEFFLER Mover (Robo Taxi) und weitere Mikromobile erarbeitet. Am SHARE am KIT, dem SCHAEFFLER Standort auf dem Campus des KIT, forschen SCHAEFFLER Mitarbeiter gemeinsam mit universitären Projektpartnern an neuen Ansätzen, welche auf direktem Weg in die industriellen Entwicklungsprojekte an anderen Standorten überführt werden. In den vergangenen Jahren wurde Know-How und Expertise in den Bereichen Gesamtfahrzeug-Architektur, Fahrzeug-Automatisierung, Chassis-Systeme, Regelung von x-by-wire-Systemen sowie der Trajektorienfolgeregelung aufgebaut.

Das Karlsruher Institut für Technologie (KIT) ist eine der größten Forschungseinrichtungen Europas, wobei das KIT-Zentrum „Mobilitätssysteme“ die Forschungs- und Ausbildungsaktivitäten im Bereich der Mobilität mit derzeit 40 KIT-Instituten zusammenführt. In FLOOW ist das Institut für Fahrzeugsystemtechnik (FAST) beteiligt. Dieses entwickelt ein umfassendes und tiefes Systemverständnis, Methoden und Prozesse zur Bewältigung der Komplexität in der Fahrzeugentwicklung sowie technologische Ansätze zur Verbesserung der Fahrzeugfunktionen. Dabei steht die ganzheitliche Untersuchung von Gesamtfahrzeugsystemen vor dem Hintergrund der umgebenden Verkehrsbedingungen und der Interaktion mit dem Fahrer im Vordergrund. Erfahrungen bei der Erforschung und Ausarbeitung der Funktionalitäten von Fahrerassistenzsystemen und deren Umsetzung in Demonstratorfahrzeugen liegen ebenso vor wie im Bereich der insbesondere für die Kundenakzeptanz solcher Systeme wichtigen Fahrer-Fahrzeug-Interaktion.